Differential Drive Robot Path Planning
Over the course of my class Quantitative Engineering Analysis 2 (Spring 2021), I explored some of fundamental concepts at the heart of robotics. In two separate projects, I used these concepts as part of a team to make a differential drive robot simulator accomplish different tasks.
In the “Bridge of Doom” challenge, my team wrote a program to autonomously pilot a robot across a bridge which could be represented by a parametric curve. Using the parametric equation, we generated discrete instructions for the velocities of the robot’s two wheels. We then sent the instructions to the simulated robot over a defined timestep and collected data to reconstruct the robot’s path.
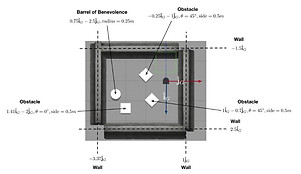
For the “Gauntlet” challenge, my team used our knowledge of potential fields and gradient descent to navigate the robot through a field of obstacles towards a target. We used the simulated robot’s laser scanner to create a governing equation for the gradient descent. Similarly to the “Bridge of Doom” challenge, we collected data for the position of the wheels and reconstructed the path of the robot.